硕士论文网第2021-08-18期,本期硕士论文写作指导老师为大家分享一篇
仿生机械论文文章《基于Pro/E的仿生机械鸟机构设计》,供大家在写论文时进行参考。
摘 要: 仿生机械鸟在矿井救灾、抢险、有毒害环境下搜救及在日常生活方面有较好的应用。通过分析鸟类飞行原理,设计出一种模拟鸟类扑翼飞行姿态的机构,依仿生鸟的受力情况,确定其的驱动方式、关节传动方式。 利用 Pro/E 对机构进行三维建模、运动仿真分析,通过对样机相关的试验,验证了机构的可行性和合理性。
关键词: 仿生机械鸟;三维建模; 机构设计; 仿真分析
引言
仿生机械鸟是模仿鸟类的飞行原理,与普通飞行器相比,尺寸较小、便于携带、飞行灵活,可原地或在很小场地起飞,并具有较好的飞行特性和空中悬停能力,能完成其他飞行器所无法执行的任务等优点。 在矿井及有毒害环境下可进行搜救、探测与环境监测,在日常生活中可提供空中拍摄和短距离小物品送达等。
1 仿生机械鸟机构设计方案
仿生机械鸟运动系统由翅膀扑翼飞行机构、翅膀折叠机构、头部摇摆机构、尾部变向机构和腿部行走机构等组成,如图 1 所示。
头部和尾部的摇摆采用并联的曲柄摇杆机构;驱动头部摇摆和尾部转向的电动机选用微型直 流电机;翅膀折叠采用平行四边形机构,翅膀的上下扑动使用曲柄摇杆机构;驱动翅膀上下扑动和折叠的电动机选用微型直流电机。 脚部直线行走选用单自由度六杆步行机构,驱动行走的电机选用微型直流电机。 整机总重量控制在 1 kg 以下。
2 翅膀扑翼飞行设计
(1)翅膀扑翼飞行实现机构
翅膀扑翼通过直流电机 经过齿轮系 带动齿轮旋转,从而使曲柄旋转,在曲柄的旋转下,摇杆能够实现上下摇摆,摇杆上下摆动带动翅膀骨架上下摆动,通过控制微型直流电机的转速来控制扑翼的快慢程度,如图 2(a)所示。
(2)翅膀机构运动分析
①按照翅膀的设计尺寸,如图 2(b)所示。 基于 Pro/E三维软件对翅膀结构进行初步建模, 运用 Pro/E 软件仿真模块对翅膀扑翼模拟分析,曲柄转动一周,绘出翅膀扑翼的运动轨迹;②运用 Pro/E 仿真模块分析出扑翼角度随时间变化,并确定上下扑翼最大角度是否满足初步设定值。 在 Pro/E 中为方便测量扑翼角度随时间的变化,模拟时是以垂直平面为基准,测量翅膀与垂直面的夹角变化状态(见图 3)。 从图 3 可以看出翅膀与垂直平面的最小扑翼角度约为 50°,翅膀与垂直平面的最大扑翼角度为 112°。
3 翅膀折叠设计
(1)翅膀折叠实现机构
翅膀折叠结构能够模拟 鸟类翅膀的 展开和收缩的效果。 折叠机构的传动是通过直流电机带动一对啮合的直齿轮旋转,其中有一个直齿轮与螺纹杆相联,从而使得螺纹杆带动螺纹套前后移动实现折叠效果。 如图 4(a)所示。从外形协调的方面考虑 设定翅膀展 开时总长为 900 mm,收缩时为 100 mm,折叠角度为 80°。 如图4(b)所示。
(2)翅膀折叠机构运动分析
按照翅膀折叠结构的设计尺寸, 利用 Pro/E 三维软件对翅膀折叠结构进行初步建模, 运用 Pro/E软件仿真模块对翅膀折叠结构模拟分析,翅膀收缩与张开一次时,绘出翅膀折叠机构关键点的运动轨迹如图 5 所示。
4头部、尾部摇摆设计
(1)头部摇摆实现机构为了能够模拟鸟类头部摇摆的姿态,采用并联式曲柄摇杆机构。 该机构是由 2 个微型直流电机分别控制 2 个曲柄摇杆机构组成,通过 2 个微型直流电机分别控制 2 个曲柄摇杆机构,实现了头部的上下左右运动,如图 6(a)所示。(2)头部摇摆机构运动分析运用 Pro/E 软件仿真模块对头部摇摆机构进行模拟分析,当曲柄向后转动,摇头支架向上摆动如图 6(a)所示;通过控制 2 个微型电机的正转和反转就可以使仿生机械鸟的头部上下左右摆动,其运动原理如图 6(b)所示(3)尾部变向实现机构为实现仿生机械鸟在飞行中能够像鸟类上升、下降、左转、右转的转向功能。 将仿生机械鸟的尾部设计成方向舵的形式,可以改变方向舵的方向来实现转向。 采用了曲柄摇杆机构, 实现了上下倾斜功能;另外,在摇杆处设置一个微型的舵机直接带动摇摆方向盘,通过控制舵机的正反转来实现左右偏摆的功能。通过分别控制 2 个微型电机,就能使尾部机构实现上下倾斜、左右偏摆,达到了模拟鸟类飞行的转向功能,如图 7 所示。(4)尾部变向机构运动分析运用 Pro/E 软件仿真模块对尾部变向机构模拟分析,微型电机带动曲柄旋转,在连杆的作用下使摇杆能前后摆动,从而能使尾部上下倾斜;在摇杆处安装舵机直接与摇摆方向盘联接,摇摆方向盘中有环形限位槽,防止摆动过度,失去飞行稳定性,可通过控制舵机正反转实现左右偏摆功能。
5 腿部行走实现机构
行走机构传动方式是采用一对锥齿轮传动,小锥齿与直流电机相联,大锥齿则与旋转轴联接,旋转轴 带 动 曲 柄 旋 转 而 实 现 行 走 效 果,其 传 动 系 统 如图 8(a)所示。 其行走机构尺寸如图 8(b);利用 Pro/E 软件仿真模块对行走机构模拟分析,曲柄转动一周,绘出足部运动轨迹如图 8(c)所示。
6 运动仿真分析
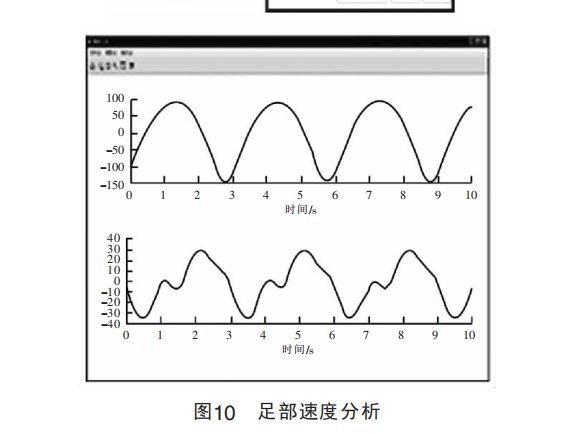
基于 Pro/E 的仿生机械鸟机构分析功能模块,可进行运动分析(位置、速度和加速度分析)以及动力学运动分析(摩擦力、重力和作用力),在设计周期的早期发现间隙和干涉等问题。运行机构分析,验证机构的可行性并分别测量扑翼机构翅膀末端 X、Z 方向和行走机构 足部 X、Z行走机构是最容易发生干涉的地方,必须对行走机构在运动仿真中进行干涉分析,确保在行走的过程中不发生干涉现象,其分析过程:首先进行碰撞检测设置,设置为全局碰撞检测和碰撞时停止动画回放,如图 10 所示,设置碰撞时停止动画的目的是当发生碰撞干涉时,动画停止并高亮显示干涉位置。
7 结语
翅膀扑翼飞行机构为曲柄摇杆机构 和齿轮机构组合方式,实现了扑翼飞行运动;翅膀折叠机构为连杆机构和螺旋机构组合形式,较好地模拟鸟类翅膀的折叠原理,并给予了仿生机械鸟更多的飞行姿态;步行机构选用平面六连杆机构,较合理设计杆件长度,达到较好地模拟了鸟类的行走。
参考文献:
[1]周骥平,武立新,朱兴龙. 仿生扑翼飞行器的研究现状及关键技术[J].机器人技术与应用,2004(6):12-17.
[2]余联庆,赵毅,杜利珍,等. 小型双足步行机器人机械机构设计[J]. 中国水运(理论版),2007,2(7):183-184.
[3]唐为民,刘正平,路英华.Pro/E 机构仿真模块行走机器人创新设计[J].机电产品开发与创新, 2012,25(4):16-18.
[4]张学军,张欣,丛佩超.移动式救援机器人的转铰空间轨迹跟踪控制问题研究[J].制造业自动化,2014,36(7):20-24.
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《基于Pro/E的仿生机械鸟机构设计》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网仿生机械论文栏目。

 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文