硕士论文网第2021-04-04期,本期硕士论文写作指导老师为大家分享一篇
仿生机械论文文章《仿生机械论文:一种脑电远程控制的仿生机械手臂》,供大家在写论文时进行参考。
【摘要】该款仿生机械手臂利用安装在头部的TGAM模块和安装在人手臂部的加速度传感器采集运动信号,通过无线传输远距离制定仿生机械手臂,实现机械臂与人脑意识和人臂的同步运动。机械手臂可实现五个自由度的运动,可靠的闭环控制系统可实现准确定位,准确抓取,来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,体现了人的智能和适应性。脑电远程控制是该款仿生机械手臂的显著特点。
【关键词】机械手臂;TGAM模块;同步;仿生
0.引言
仿生机械臂是近几十年发展起来的一种高科技自动化生产设备,仿生机械臂作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。广泛应用于机械制造、冶金、电子、轻工和原子能等行业。机械臂作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。现有的大多数机械手体积较大,有线传输,并需要在电脑客户端进行编程等繁琐的技术操作,操作难度大,不易携带。该款仿生机械手臂采用加速度传感器和TGAM控制模块,工作时结合手臂的运动和脑电信号的采集,通过无线传输远程控制仿生机械臂的运动,实现物体搬运。脑电感应的控制设计方式填补了国内机械臂发展是一个空白。
一、仿生机械手臂工作原理
仿生机械手臂的机械臂主要由五个舵机和支架构成,能完成五个自由度的运动,可模仿人体胳膊关节的自由活动。控制部分由TGAM模块、加速度传感器构成。机械臂和控制部分无线传输,可实现远距离操作。加速度传感器配带在手臂上,手臂按作业要求上下、左右、前后、翻转运动时,通过无线传输可控制仿生机械手臂做同步运动;TGAM模块配带在头部采集脑电信号,并通过无线传输可控制仿生机械手臂的抓取动作,两者相结合可完美的实现像人手臂一样的上下、左右、前后、翻转和抓取运动,操作习惯与人体一致,符合人体的仿生学要求。
二、仿生机械手臂设计方案
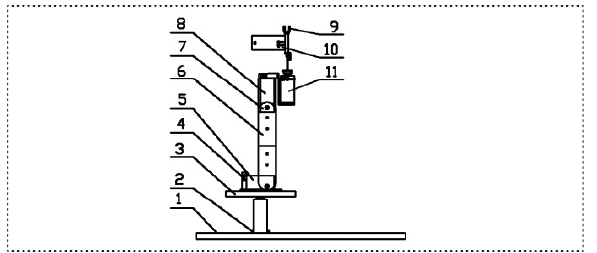
仿生机械手臂由执行机构和控制机构两大部分组成。执行机构由底座1、舵机2、转盘3、固定架4、舵机5、支架6、固定架7、舵机8、机械爪9、舵机10、舵机11和无线接收器组成,仿生机械手臂由五个舵机和支架构成一个五个自由度的活动手臂,能模仿人体胳膊关节的自由活动。仿生机械手臂执行机构结构示意图如图1所示。
舵机2安装在底座1上,并与转盘3相联,可带动转盘(3)在水平面上旋转;舵机5位于转盘3上,其上安装有支架6,舵机5用于带动支架6在竖直面上摆动;舵机8安装在支架6的顶部,其能够相对于支架6摆动,摆动面在竖直面上;舵机11位于舵机8的侧方,二者固定连接、保持相对静止,舵机11的输出轴朝向上,其上安装有机械爪9,舵机11用于带动机械爪9旋转;舵机舵机10安装在机械爪9上,用于带动机械爪9完成抓取动作;控制机构由TGAM模块、加速度传感器和无线发射器组成。TGAM模块佩戴在头部采集脑部电信号;加速度传感器可以配带在控制者的手臂上。两者与无线发射器有线相联。工作时,先将仿生机械手臂上的舵机引线连接在无线接收器上。加速度传感器和TGAM模块的引线连接到无线发射器上。接通电源后,无线模块进行蓝牙配对。配对成功后通过移动配带在控制者手臂上的加速度传感器沿上下、左右、前后、翻转四个方向运动,通过无线传输就可控制仿生机械手臂沿同样方向同步移动。TGAM模块佩戴在头部采集脑部电信号通过无线无线发射器和无线接收器来实现信号传输,控制仿生机械手臂上的机械爪开合,实现抓取功能。通过控制加速度传感器的运动和TGAM模块采集脑电信号就可完全模仿自然人手臂的移动抓取功能、可以像人手臂一样上下、左右、前后运动,抓取物品,实现肢体运动与意念完美匹配的仿生控制。
三、仿生机械手臂结构特点
该款仿生机械手臂采用TGAM脑电模块对机械手臂抓取进行意念控制,并实时配合人体手臂的运动,完全模仿了人体的自然操作习惯,仿生效果十分完美。操作简便,摆脱了电脑终端繁琐的技术操作,直接利用人手传感进行同步仿生控制。运动灵活,控制精确,机械臂与无线控制完美结合,可实现无线远距离操作,抗干扰强。
四、结束语
该款仿生机械手臂满足了人体学、仿生学和运动学方面的个性化设计。由加速度传感器和TGAM模块采集脑部电信号构成闭环控制系统,可以确保机械臂的准确定位。该款设计操作方便,易于实现,满足了控制系统稳定性和精确控制的要求。该款仿生机械手臂可广泛应用在机械制造、冶金、电子、轻工和原子能等行业。市场潜力广,使用范围广,有很好的使用推广价值。
参考文献
[1]王国彪.仿生机器人研究现状与发展趋势[J].机械工程学报,2015(7):51-13.
[2]郭策,戴振东,孙久荣.生物机器人的研究状况及其未来发展[J].机器人,2005(3):27-2.
[3]李松,朱衍飞,陈奇.一种臂载式多功能机械手臂的设计[J].机器人技术,2012(3).
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《仿生机械论文:一种脑电远程控制的仿生机械手臂》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网仿生机械论文栏目。
 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文