硕士论文网第2021-08-18期,本期硕士论文写作指导老师为大家分享一篇
机械手臂论文文章《基于leapmotion的手势仿生机械臂系统设计》,供大家在写论文时进行参考。
摘要:针对目前机械臂的控制方式不够直接和简便,提出了一种基于人体手势控制的控制方法.利用LeapMotion体感控制器的数据,结合计算机编程语言C#设计了人体手势识别软件,可识别人体手势运动情况并得出手势运动数据,搭建了通信网络,将手势运动数据远程传输到机械臂控制器,结合机械臂运动控制算法,使机械臂完成相应的人体手势仿生动作.设计制作了机械臂控制器实验平台,验证了该控制方法的有效性,稳定地实现了对机械臂手势仿生动作控制.
关键词:手势控制;计算机编程语言;手势识别软件;手势仿生动作
随着机器人技术的发展,人类对机器人的要求已不仅仅是车间的流水线作业,对现代社会的机器人提出了更高的要求,人们希望机器人能在更多复杂且危险环境下作业.最直接的就是在机器人上搭载机械臂,从而控制机械臂代替人类进行一些高危操作,完成作业任务,伴随而来的问题就是机械臂的控制方式[1-3].因此目前大多数都采用遥控器进行控制,遥控器对机械臂进行控制时,需要人为主观地去把握控制过程和抓取动作力度,在控制过程中,不断调整机械臂抓取角度.此种控制方式的优点在于能够实时的把握机械臂运动情况和抓取程度,提高了作业的安全性和稳定性,但遥控器控制机械臂的过程中,人为地调整遥控器信号来控制机械臂显得尤为繁琐,且对人的操作要求较高.没有娴熟的操作技术并不能很好地控制机械臂进行动作[4-6].因此,本文提出了一种基于人体手势控制的控制方式.并设计制作了机械臂实验平台来验证此种控制方式.
1系统设计原理与结构
1.1系统设计思路及难点
本系统采用LeapMotion体感控制器识别出人的手臂和手指运动情况,从而得出基本数据,将基本数据传输给电脑上的手势识别软件,该软件可以对基本数据进行处理,得出更加可靠且精准的数据,其次,将处理后的数据通过网络通信远程传输给机械臂控制器,机械臂控制器根据人体手势数据去控制机械臂进行相应的仿生动作.在这个设计思路中,难点在于,采用何种编程语言开发设计手势识别软件、机械臂控制器采用哪一类控制算法对机械臂进行控制使得机械臂运动平滑.
1.2整体结构设计
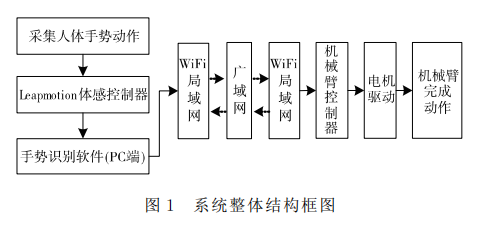
系统主要包括LeapMotion体感控制器、手势识别软件、网络传输单元、机械臂控制器、电机驱动电路.系统结构框图如图1所示
2系统硬件设计
系统硬件主要由LeapMotion体感控制器、ESP8266网络通信单元、机械臂控制单元电路、系统电源共4种电路组成.硬件框图如图2所示2.1LeapMotion体感控制器LeapMotion是一款基于双目视觉技术的体感交互设备,其主要工作流程是红外LED发出红外线,照射到物体后进行反射,反射后的光线通过红外滤光片,让红外线通过且滤掉其他可见光,最后通过LeapMotion搭载的2个摄像头接收,基于双目立体视觉的算法计算出物体在空间的三维位置.可以用来识别人体运动手势和各个手指关节的位置、姿态信息,即可以得出人体手掌和手指的空间坐标(X、Y、Z)和姿态角(Pitch、Roll、Yaw),开发者可通过官方提供的SDK得到上述数据,进行二次开发[3].
2.2ESP8266网络通信单元
在本系统中,选用ESP8266WiFi芯片进行网络通信电路设计,该芯片支持标准的IEEE802.11b/g/n协议,完整的TCP/IP协议栈.ESP8266支持STA/AP/STA+AP三种模式,如表1所示
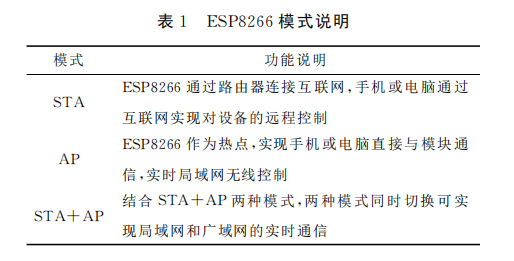
本系统中的网络通信部分,选用ESP8266STA+AP模式,通过Leapmotion体感控制器获取人体运动手势后,通过“局域网+广域网”的通信方式与机械臂实时远程通信,将体感控制器识别发出的人体运动手势传输给机械臂.
2.3机械臂控制器电路
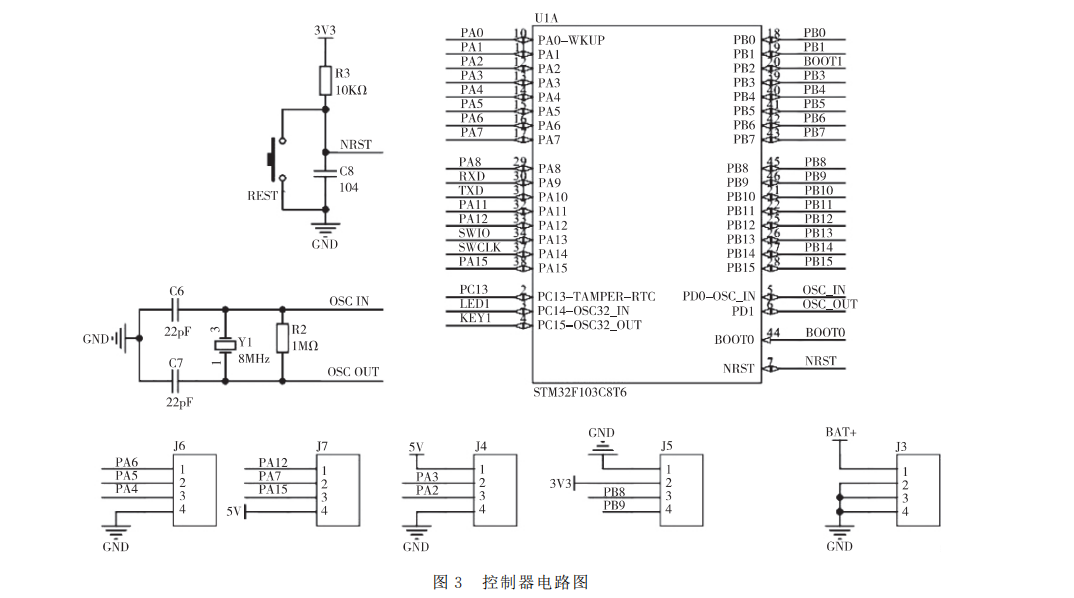
对于一个控制系统而言,核心部分就是主控芯片,它执行用户指令并协调其它各个模块的工作.在机械臂控制器电路中,由于整个控制系统的运算量较大,对实时性要求比较高,需要一块拥有强大运算能力的、可主控的、同时又不能浪费的硬件资源,对各硬件资源权衡各种性能后,最终选择了意法半导体公司的ARMCortex-M3内核的STM32F103C8T632bit的MCU作为本控制系统的主控芯片,该芯片拥有48个引脚,硬件资源丰富,足够完成系统的设计而又不浪费资源.根据芯片的用户手册及机械臂控制器的要求设计的电路图如图3所示.
2.4电源电路
在每一个电路系统中,一个稳定的电源电压是系统能够稳定工作的基础,同时也能确保传感器测量数据的准确性.所以必须给机械臂控制电路板加入稳定的电源稳压电路.由于该系统是由标称12V的锂电池供电,然而主控芯片STM32F103C8T6、传感器、舵机模块都工作在3.3V或5V的电压下,所以选择直接从锂电池的输出电压直接稳压到3.3V和5V给控制系统供电.除此之外,由于驱动每个电机需要500mA电流,而组成机械臂的电机个数较多,导致系统总电流较大,在制作稳压电路时,制作多路稳压电路,将所有的电机平均分开,多路稳压电路共同提供电机的电流,减少稳压电路的负担,使整个系统电源更加稳定.
3系统软件设计
3.1系统总体程序流程图
通过手势识别系统识别人体手势运动,无线网络将识别的手势控制数据情况传输给机械臂控制器平台,机械臂控制器及其机械臂完成相应移动和仿生动作,系统工作流程图如图4所示.
..........................
结语
利用LeapMotion体感控制器得出人体手势运动的基本数据,控制器对数据进行控制算法处理,最后对机械臂进行仿生运动控制.这种机械臂的控制方式更加流畅和简单.此种控制方式可以降低用户的操作强度,极大地解放了人的双手,大幅度提高控制效率,使得人机交互更加自然,可在工业控制和服务领域进行推广,具有良好的应用前景.
参考文献
[1]方志刚.人机交互技术综述[J].人类工效学,1998,4(3):64-66.
[2]杜钊君.基于体感传感器的手势识别及人机交互系统研究[D].武汉科技大学硕士学位论文,2013.
[3]胡弘,晁建刚,林万洪,等.LeapMotion虚拟手构建方法及其在航天训练中的应用[J].载人航天,2015,21(3):257-262.
[4]陈一民,张云华.基于手势识别的机器人人机交互技术研究[J].机器人,2009,31(4):351-356.
[5]朱佩.基于机器视觉的移动机器人机械臂控制系统设计与实现[D].东南大学硕士学位论文,2015.
[6]陈帮民.手势跟踪研究与手势识别应用平台实现[D].中山大学硕士学位论文,2011.
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《基于leapmotion的手势仿生机械臂系统设计》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网机械手臂论文栏目。
 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文