硕士论文网第2021-08-26期,本期硕士论文写作指导老师为大家分享一篇
学位论文文章《关于极区航海用惯性导航系统的探讨》,供大家在写论文时进行参考。
摘 要:目前,航海用惯性导航系统普遍采用常规的当地水平固定指北机械编排,不适合极区工作,为了满足航海导航的需要,研究了极区惯性导航技术。给出了常规机械编排在极区导航中面临的主要问题,阐述了国内外极区惯性导航系统的发展与现状,分别介绍了自由方位、游移方位、格网及横坐标惯性导航系统的机械编排,并分析了它们存在的问题,最后简要给出了未来极区导航技术研究的发展方向。
关键词:惯性导航系统;极区导航;机械编排
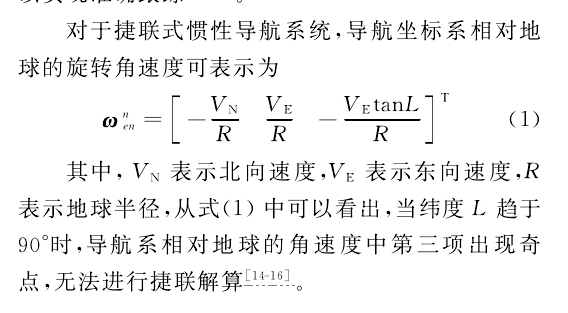
0 引言
极区对于我国的重要性主要体现在以下几点:首先,北极地区石油和天然气资源非常丰富,据权威统计,全球待发现的石油和天然气资源25%分布在北极地区[1-2],从北极地区获得油气资源有利于我国能源供应的多样化,缓解进口油气资源所带来的战略压力;再有,从地缘分布上来说,北极连接 美国、英国、俄罗斯等国家,其战略地位极其重要;另外,北极航道具有巨大的商业价值[3],北极地区的冰层逐步融化将为人类呈现东北航线与西北航线2条战略通道,有利于我国的对外贸易。面对极区日益提升的战略价值以及对我国的重要意义,极区的航海、科考等活动正逐步增多。无论是船舶极区航行、工程作业还是科考活动都离不开导航设备的支持[4-5]。一来船舶基于导航设备测量并解算出其运动参数来确保船舶的安全,再者船舶的探测系统和工程装备的运行也离不开导航系统的支持[6]。现有的极区导航手段主要是卫星导航和惯性导航。但是由于极区上空卫星分布较少,同时太阳风暴、磁暴和电离层暴频繁[7-8],卫星信号易受到影响,甚至无法正常工作。而惯性导航系统不需要接收外界信号也不辐射信号就可以完成导航工作,是全自主导航设备,也是现代船舶实现极区导航能力的重要途径[9-10]。在极区,采用常规当地水平固定指北机械编排时,无论是平台式还是捷联式惯性导航系统都存在难以精确定位定向的问题。文中概述了常用于解决极区导航问题的几种惯性导航系统机械编排,包括:自由方位、游移方位、格网及横坐标机械编排,并对这几种机械编排的优缺点进行了总结。在文章结尾,展望了极区航海用惯性导航系统未来的发展方向。
1 常规机械编排在极区导航所面临的问题
目前,航海用惯性导航系统通常把地理坐标系作为导航坐标系。对平台式惯性导航系统来说,导航坐标系的y轴要始终跟踪地理北向[11],当船舶在极点周围区域航行时,由于经线快速收敛,导航系将绕z轴以高速率旋转(如图1所示)。按照图1中近极点轨迹航行,导航坐标系y轴会很快变化180°。在极限情况下———直接穿越极点时,旋转速率将会变得无穷大,机械式的实体陀螺稳定平台难以实现准确跟踪
从上述分析可见,平台式和捷联式两种类型的惯性导航系统在极区采用当地水平固定指北机械编排时,经线快速收敛都会使得地理北向难以跟踪和计算。因此,把地理坐标系作为导航参考系不再适用,为解决该问题,国内外学者设计了多种类型的极区惯性导航机械编排并应用于惯性导航系统中。
2 极区惯性导航发展现状
2.1 国外极区惯性导航发展现状
20世纪中叶,国外便对极区惯性导航系统开展了相关的研发工作。1958年,美国在“鹦鹉螺”号核潜艇上配备了Mark19与Mark23两型陀螺罗经,潜艇驶入北极进行了巡航,其中Mark19采用了游动方位机械编排,Mark23采用了自由方位机械编排。当潜艇驶入北极以后,2个陀螺罗经的精度均有所下降,并在纬度升高到88°后失去导航的能力,无法正常工作,在地理极点附近不工作范围为11.9*1.7miles的椭圆[17-18]。文献[19]报道了客机安装的美国LTN-72R型导航系统采用的是游动方位机械编排,但是并没有对极区导航精确性的相关阐述。文献[20-21]中介绍了俄罗斯研制的一款惯性罗经系统Vega-M,Vega-M的工作范围为南北纬85°以内,在80°~85°范围内,其航向误差比低于80°的情形会增大1倍。2003年,Vega-M搭载破冰船到达北纬89°地区(其航行路线如图2所示)。试验结果表明:在超出北纬85°时,航向误差会明显增大。俄罗斯I-42激光陀螺捷联式惯性导航系统也采用了游动方位机械编排,可以在纬度≤82°的区域内进行定位定向。从以上两种机械编排的工程应用来看:比较当地水平固定指北机械编排,它们无需对地理北向进行跟踪和计算,但其精度会随纬度升高而降低,在地理极点附近无法工作。不同于游动和自由方位的概念,K.C.Maclure于1941年在其论文Polar navigation中首次提出了格网导航的概念[23]。1945年5月,白羊座Aries I号采用格网航向+陀螺仪的导航方法完成了极区的导航任务,从那时起格网导航被广泛应用。在1954年10月,英国皇家空军飞行学院的飞机Aries IV也采用格网导航方法飞越了地理北极[24]。据报道,美国在魟鱼号和萨哥号核潜艇上装备的N6A(MK1)型平台式惯性导航系统极区模式也采用了格网导航。除了格网导航之外,横坐标系下惯性导航[25]概念的提出也为解决极区导航问题提供了途径。麻省理工学院(Massachusetts Institute of Technolo-gy,MIT)在惯性导航类专著Inertial NavigationSystem中率先提出了横坐标系下的惯性导航,这种方法将极轴设在赤道平面内,可以解决极区导航的问题[26-28]。美国的Honeywell公司在其专利[29]中把地球看作是一个理想球体,给出了横地理经纬度和原始经纬度之间的转换关系,为当时的极区惯性导航研究提供了新的路径。根据报道,美国及北约海军现役水面船舶和潜艇的标配设备———MK49双轴旋转调制式惯性导航系统采用了横坐标机械编排。20世纪90年代,MK49旋转调制式惯性导航系统搭载英国海军HMS TIRELESS潜艇开展了13天的极区性能测试工作,测试结果显示,借助于横坐标机械编排和双轴旋转调制技术,MK49在极区的导航误差未出现增大的情况,其系统精度满足设计指标要求。
2.2 国内极区惯性导航发展现状
国外极区惯性导航系统目前较为成熟,已经形成了型号装备并成功应用[30-31]。而国内惯性导航系统发展起步晚,现役航海类惯性导航设备均采用当地水平固定指北方位机械编排,即采用地理坐标系作为导航坐标系,在极区存在不可导航区域。在2010年后,为了契合我国对于极区科考和极区商业运输等方面的需求,我国极区惯性导航系统以及相应的机械编排都得到了快速发展,其发展方向主要集中于格网惯性导航系统和横坐标系惯性导航系统。哈尔滨工程大学在2010年开始进行极区惯性导航机械编排的研究工作,2013年在国内首次申请了有关于极区惯性导航的发明专利,并给出了常规模式与极区横向导航模式之间的转换方法。同年,西北工业大学基于WGS-84地球几何模型,推导了格网系下的惯性导航机械编排,并通过仿真分析给出了格网惯性导航误差规律同常规机械编排的关联性,同时验证了格网导航应用于极区的有效性[32-34]。2014年,哈尔滨工程大学基于地球圆球模型,研究了横向坐标系下的惯性导航算法,并提出了相应的误差抑制技术,有效减小了航海用惯性导航系统的振荡误差项[35-37]。同年,东南大学基于参考旋转椭球几何模型,设计了横坐标系力学编排,并给出了一套进入和驶出极区的模式切换逻辑,该逻辑判断可避免由导航误差引起的极区模式和常规模式之间的频繁切换[38]。2015年,中船重工707所研究了格网系下的误差传播规律,并对高纬度下的格网航向误差表达式进行了详细的数学推导,阐明了其保精度工作的机理[39]。2016年,哈尔滨工业大学设计了格网系下的极区惯性/重力梯度仪组合导航滤波器,并利用蒙特卡罗仿真手段进行了精度分析[40]。2017年,解放军信息工程大学针对旋转式激光陀螺惯性导航系统设计了极区格网惯性导航算法,并分析了在格网系下单轴旋转调制系统的误差传播特性[41]。在极区惯性导航系统方面,中航工业618所和航天科工33所将研究重点放在格网惯性导航系统上;而哈尔滨工程大学和中船重工707所将研究重点放在横坐标惯性导航系统上。目前,两类极区惯性导航系统都已工程化并开展了极区航行试验,从哈尔滨工程大学光纤罗经设备及其所采用的横坐标惯性导航机械编排在极区试验的效果看,横坐标惯性导航机械编排在北极和南极高纬度地区可以满足极区航海导航的需求,已具备工程实用化的条件。
3 极区惯性导航典型机械编排
已有的极区惯性导航机械编排主要有自由方位机械编排、游动方位机械编排、格网机械编排和横坐标机械编排。下面将概述它们的工作原理,其中自由方位和游动方位导航系统的原理及其机械编排类似,因此将它们归为一节来阐述。
3.1 自由方位和游动方位惯性导航系统
1)自由方位导航惯性导航系统在自由方位惯性导航系统中,平台坐标系相对3惯性空间旋转角速度在平台坐标系z轴上的投影为0,即ωninz=0(2)其中,i表示惯性坐标系,n表示平台坐标系,由上可知平台坐标系绕其z轴无旋转,这样就不需要对方位轴陀螺施加力矩,克服了平台在方位上跟踪地理北向时施矩困难的问题,但平台坐标系yn轴与地理坐标系yt轴不再重合,存在着一定的夹角,通常称为自由方位角α,如图3所示。夹角不为0,而是一个随时间变化的游动方位角α,如图4所示。从工作原理上来看,游动方位和自由惯性导航系统属于一类,它们的工作原理也相似。游动方位惯性导航系统和自由方位惯性导航系统类似,游动方位角在极点处面临失去北向基准进而无法定义的问题,即游动方位惯性导航系统也无法在极点附近使用。
4 未来极区惯性导航的研究展望
极区惯性导航系统在国外已成功应用。美国现役的MK49旋转调制式惯性导航系统借助于横坐标机械编排和双轴旋转调制技术,极区性能指标与中低纬度相比无下降。在国内,极区惯性导航系统机械编排研究主要集中于格网惯性导航和横坐标惯性导航,近期已对这两种类型极区惯性导航系统机械编排开展了实船设备的极区航行试验测试并取得了良好的效果。展望未来,极区航海用惯性导航系统将朝着下述3个方向发展。
1)极区PNT中的惯性导航技术
极区综合定位、导航、授时(Positioning,Navi-gation,Timing,PNT)系统作为全球PNT的重要组成部分,为全船用户提供定位、导航、授时基准[49-51]。在极区PNT体系结构的4个层级中,惯性导航系统属于信息感知层和信息融合层中的核心设备。在极区导航参考框架下,惯性导航系统的故障诊断及监测报警技术、多信息融合技术[52-56]均是研究的重点。此外,惯性导航信息在信息交互层需要与其他传感器信息进行协同、互相校准与交互,所以还需考虑其通用性和兼容性。
2)极区惯性导航模拟与测试技术
极区物理场特性(包括重力场、地球自转角速度矢量、电磁环境、气象环境等)与中低纬度地区差异明显,而我国不属于高纬度国家,开展实船航行试验经济和政治成本较高。分析极区特殊物理场对惯性导航系统的性能与可靠性影响机理,研究极区惯性导航系统的模拟测试技术,建立导航设备极地性能的综合评价体系显得尤为重要。
3)极区惯性导航系统关键技术
极区地球自转角速度矢量与重力矢量几乎是共线的,导致惯性导航系统难以完成自对准。近年,基于伪地球坐标系的机械编排[57-59]以及基于地球坐标系的法向量机械编排[62-63]被提出,为极区自对准提供了新思路。船舶进入极区时,机械编排需要由常规模式转换至极区模式,以往采用地球椭球模型时横向转换复杂,难以实现。针对该问题基于虚拟圆球模型的横向极区导航方法被提出[60-61],为模式转换研究开辟了新路径。此外,为了满足船舶长航时和高精度导航的需求,还需要进一步研究极区导航的误差抑制技术,包括极区阻尼技术、综合校正技术和旋转调制技术。
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《关于极区航海用惯性导航系统的探讨》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网学位论文栏目。
 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文