硕士论文网第2020-08-17期,本期硕士论文写作指导老师为大家分享一篇
机械论文文章《空间七自由度冗余机械臂动力学建模与控制研究》,供大家在写论文时进行参考。
空间机械臂常用于完成空间站舱段的转位对接,航天飞机的对接等。在空间机械臂的辅助对接过程中机械臂需要与环境接触,因此需要有效地控制机械臂与环境作用力。在辅助对接任务过程中,空间机械臂需要在主对接保持一定的对接力,而在其他方向上则保证一定的柔顺性。基于以上特点,本章中采用基于增强混合阻抗控制的空间冗余机械臂完成辅助对接任务。与空间非冗余机械臂不同的是,对于空间冗余机械臂,其在完成空间复杂力控制任务的同时,可以利用冗余度完成额外的任务。在本文中仿真并模拟空间机械臂臂平面内某处受障碍物碰撞利用自运动,根据臂平面的阻抗特性保护自身不受破坏的特性。 本章研究的增强混合阻抗控制为基于位置内环的混合阻抗控制,即是在位置内环的基础上增加力外环,其中位置内环主要任务为跟踪目标加速度,通过目标阻抗关系根据期望力调节目标加速度。据此,在 Simulink 中搭建了空间七自由度冗余机械臂的增强混合阻抗控制系统仿真框图,接着分析了混合阻抗控制的力跟踪特性,由目标阻抗微分方程可以得到增强混合阻抗控制在力控制方向上可以保持较好的力跟踪能力,其克服了传统阻抗控制只能保证柔顺性不能保证力跟踪特性的缺点。最后,仿真并分析了基于增强混合阻抗控制的空间冗余机械臂完成辅助对接任务。
第1章 绪论
1.1 课题研究背景及意义
空间机械臂在人类的太空探索中发挥着越来越重要的角色。在复杂的空间环境下,空间机械臂投入使用不仅可以有效地减小宇航员面临的风险,使其避免在极端温度以及高辐射环境下执行外空间任务;而且提高了外太空任务执行的效率。例如,宇航员的外太空活动(Extravehicular activity, EVA)对于宇航员来说是费时费力的空间任务,而对于使用空间机械臂进行外太空任务将更安全,方便和高效。目前,空间机械臂主要应用于航天飞机、空间站以及卫星上[1- 4]。 对于空间多自由度机械臂,由于无法在地面有效地进行实物仿真实验,为了研究机械臂的运动特性,因此需要建立空间多自由度机械臂的半实物仿真系统以及全数值仿真系统,而对其动力学的研究又是其中必不可少的环节之一。考虑到实时系统下,计算机的运算速度以及数据通讯速度,用于模拟机械臂运动的正向动力学需满足实时性、快速性以及稳定性。为此,有必要研究一种针对该空间七自由度冗余机械臂的实时动力学用于模拟机械臂的实际运动情况。 针对空间机械臂的控制主要分为自由运动空间机械臂位置控制,接近目标物时的视觉伺服控制以及执行与环境接触的力控制任务。对于空间冗余机械臂,可以利用冗余度优化运动学以及动力学指标。研究冗余机械臂的控制可以更好的完成复杂空间环境下的任务。本课题所研究的空间多自由度机械臂实时动力学可以满足实时仿真以及控制系统建模的需要,且本文研究的冗余机械臂的控制理论对于空间机械臂的位置以及力控制具有重要的理论意义以及适用价值。
1.2 国内外相关领域研究现状分析
十八世纪以来,人类对机械系统的研究由单刚体延伸至多刚体,以至于柔性多体系统。由多个物体通过运动副连接的机械系统即为多体系统,如航天器,空间机器人、汽车等[5]。多体系统研究对象是机械部件之间存在明显相对运动的机构。对多体系统的研究可以更好的分析实际机械系统的运动机理,多体动力学是目前应用力学研究的热点之一[6]。针对多刚体系统动力学研究,按照具体求解的问题可以分为动力学正问题、动力学逆问题和动力学正逆混合问题。动力学正问题即已知驱动力(矩)求解多刚体系统运动,动力学逆问题则已知多刚体系统的运动学量求解作用在运动副上的驱动力(矩),正逆混合问题则是系统部分运动副的运动情况和部分运动副的作用力已知而求解其它运动副的运动情况以及驱动力(矩)的问题[ 7]。由此可见多刚体动力学即研究多刚体系统运动和受力之间的关系。 针对多刚体的建模方法有很多,按照建模实现方法可以分为数值计算方法、符号计算方法以及符号和数值相结合的动力学算法,一般地说,基于数值计算的动力学算法其避免了大量中间量的计算,因此其计算量更小一点,但是无法得到多体系统运动的通用表达式,且由于数值计算过程中的累积误差使得数值计算的精度受到影响。基于符号计算的方法虽然能得到通用表达式,但是初期计算量较大,且许多多体系统的动力学符号表达式冗杂,以至于目前的计算机无法有效的进行符号运算。 按照多刚体系统建模原理大致可以分为以下几类方法[8]: 基于牛顿-欧拉的多刚体动力学研究中,刚体系统的运动分解为基于牛顿方程的平动以及基于欧拉方程的转动。牛顿-欧拉方程是许多动力学算法的基础,但是基于牛顿-欧拉方程的多体动力学建模含有较多的理想约束力,因此该建模过程的关键在于如何有效的消除理想约束力。Schiehlen 等人利用 D’Alembert 原理消去完整约束系统动力学计算过程中的约束力,而对于非完整多刚体系统,其利用Jourdain 原理消去约束力[9][10]。 基于拉格朗日研究机械多体系统动力学更具有普遍性,在基于拉格朗日列写多体系统运动方程的同时,还需要列写多体系统的约束方程。这种基于笛卡尔广义坐标的动力学方法得到系统的微分-代数方程,一般方程属于刚性的。且对于该种建模原理,微分-代数方程的数值求解一个重要的研究方向。如 Chace 等人应用Gear 积分器编写了多体动力学计算软件 dams。对于一些较为简单的多体系统,如 2 自由度平面机械臂,可以采用第二类拉格朗日方程进行建模,所得到的多体系统的动力学方程为该系统的一般式,其既可以解决动力学正问题也可以解决逆问题,且多体系统的通式可以进一步应用于控制系统研究。 罗伯特-维登伯格方法则利用关联矩阵和通路矩阵等描述机器人系统的拓扑构型,并根据牛顿-欧拉方法建立纯转动铰链系统的动力学方程,且根据达朗贝尔原理建立具有完整约束铰链的动力学方程。基于罗伯特-维登伯格方法的多体系统建模通用性强,易于编程实现,且计算量相对较小[7][8]。 凯恩(Kane)方法则是针对多自由度离散系统的一种普遍动力学方法,该算法中引入伪速度作为广义坐标来描述系统的运动,并利用 D’Alembert 建立动力学方程。其兼有分析力学与矢量力学的优点,且推导规范化,方程为一阶微分方程组,便于计算机编程计算。 基于高斯最小约束原理方法进行多体系统建模,其并不根据描述运动的具体原理进行动力学建模,而是根据变分原理分析多体系统可能存在的运动,利用泛函极值原理求解出系统的运动规律。 以上原理为多体动力学建模基本原理,基于以上原理进行空间机械臂的动力学建模,一般计算量均较大,且重复计算较多,因而机械臂动力学计算效率较低。多体动力学软件大都采用上述原理编写而成,因而一般的多体动力学软件均为离线动力学计算,且无法用于机械臂系统的实时仿真系统中。因此有必要研究可以用于机械臂实时仿真系统的实时动力学算法,为此该算法应该具有高效且计算量小的特点,为了在此基础上进行控制算法建模分析,因此机械臂的实时动力学算法需具有精度高且稳定性好等特点。国外在机械臂的实时动力学算法方面进行了大量的研究。
第2章 空间机械臂动力学建模
2.1 引言
空间机械臂的动力学即研究空间机械臂的运动情况,其主要为力(力矩)与加速度之间关系。一般地说,动力学正问题即研究在已知机械臂关节驱动力矩的情况下各关节运动情况,动力学逆问题则研究在已知机械臂关节运动的情况下求解关节驱动力矩。空间机械臂的动力学建模主要包括机械臂参数化描述,动力学量的表示以及动力学建模基本方程。 本章中首先给出空间机械臂系统的一般模型,并给出其参数化描述。紧接着介绍了空间矢量理论在动力学量表示中的应用,并指出基于空间矢量表示的动力学量更简洁方便,更有利于揭示多体系统运动特性物理本质。 本章将重点介绍空间矢量描述的空间机械臂动力学建模,其克服了传统的动力学建模其计算量较大,计算效率低的问题。且结合空间固定基座机械臂的正向动力学建模方法,分析动力学建模的效率、计算量以及稳定性问题。动力学建模的基本原理很多,实现方法也很多,动力学量的表示方法也不尽相同,因此针对不同的建模对象,不同的动力学建模任务,需要选择不同的建模方法。本章结合动力学建模方法分析了动力学建模方法的选取原则。
2.2 空间机械臂系统描述
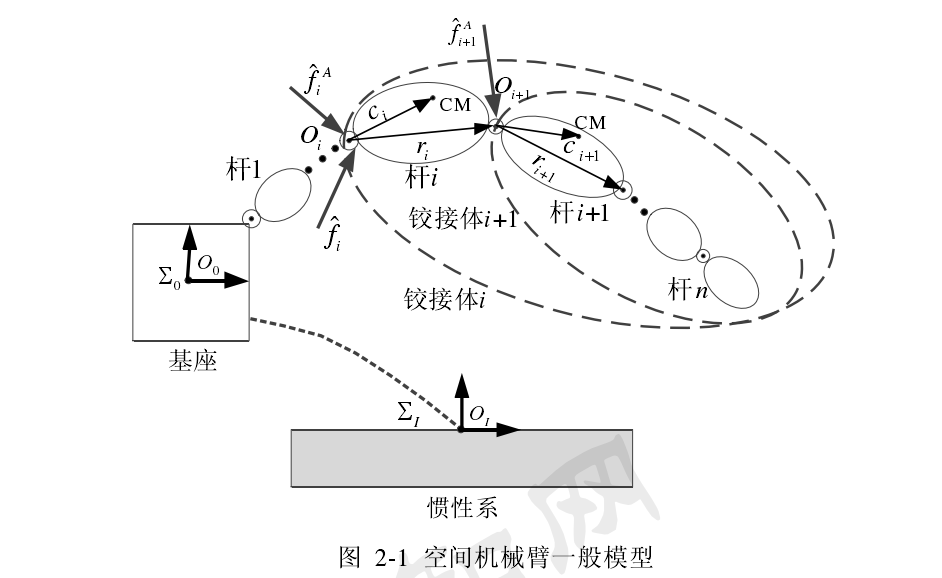
本文研究对象为空间七自由度冗余机械臂,各臂杆采用枢轴连接的的方式,根部肩部和末端腕部均有回转、偏航以及俯仰三个自由度,肘关节有一个俯仰自由度。机械臂的肩部和腕部的相互替换即可实现空间机械臂的行走。 空间机器人系统由基座(卫星/航天器)和机械臂组成。机械臂系统为七自由度开链(Open Chain)机械臂,对其物理模型假设如下:
a) 忽略机械臂的弹性效应,将其看作为刚形体
b) 关节只是连接相邻连杆,无柔性
c) 该机械臂为串行结构,无支路且末端自由、不闭合 其一般模型如图 2-1所示:
本章首先根据动力学建模的需要抽象出空间串行链式机械臂的一般模型,并给出其参数化描述,以便于进一步的动力学建模。然后基于给出动力学量的空间矢量描述,并基于该理论根据单刚体运动方程列写了单刚体动力学基本方程,并在此基础上引入铰接体概念,推导出了基于空间矢量表示的铰接体惯量矩阵。据此,研究了基于空间矢量描述的铰接体算法建立的空间固定基座机械臂的正向动力学,给出了其程序实现流程,并在 SimMechanics 中建立固定基座空间机械臂的模型,与前者进行仿真对比分析,在此基础上分析了正向动力学算法计算效率和计算精度。最后,对空间固定基座机械臂正向动力学算法进行相应的改进,可以得到空间漂浮基座机械臂的动力学,与 SimMechanics 中建立漂浮基座空间机械臂的模型进行对比仿真分析。结果均说明基于空间矢量的铰接体算法建立的空间机械臂的动力学,计算量小,计算结果精确,计算稳定性高。其可以用于全数值仿真或者半实物仿真中进行机械臂的仿真分析以及控制算法的建模分析。
第 3 章 空间冗余机械臂位置控制研究
3.1 引言
3.2 冗余机械臂构型控制
3.3 机械臂关节空间位置控制
3.4 空间冗余机械臂位置控制数值仿真研究
3.5 自由飞行空间机器人系统位置控制研究
3.6 本章小结
第 4 章 空间冗余机械臂增强混合阻抗控制研究
4.1 引言
4.2 增强混合阻抗控制原理
4.3 增强混合阻抗控制仿真平台
4.4 混合阻抗控制力控制研究
4.5 基于增强混合阻抗的冗余机械臂辅助对接仿真研究
4.6 本章小结
结 论
本课题来源于国家“863”某机械臂项目。课题主要开展空间冗余机械臂递推多体动力学,空间冗余机械臂控制的研究。本文中的研究成果如下所示:
(1) 研究空间机械臂正向多体动力学。基于空间矢量描述的铰接体算法建立空间固定基座机械臂和空间漂浮基座机械臂的正向动力学模型,在 SimMechanics中建立该机械臂的动力学模型,仿真结果表明,本文研究的递推正向动力学算法计算精度高,效率高且稳定性好,其适用于半实物仿真系统中的机械臂动力学计算要求以及控制系统建模分析。
(2) 提出了针对本文研究的空间七自由度冗余机械臂的构型控制策略,选取臂角为运动学目标函数,参数化机械臂的自运动。基于笛卡尔主任务以及扩展运动学任务(即臂角),通过阻尼最小平方法得到奇异鲁棒性运动学逆解。同时,研究了机械臂的关节空间控制器的特点。仿真结果表明,基于该理论可以有效的控制冗余机械臂的运动。
(3) 研究了针对空间自由飞行机器人协调控制,将机械臂对基座的扰动力作为姿态控制系统的反馈力,改善了基座姿态控制系统的品质。仿真结果表明这种将机械臂系统与基座视为一体的协调控制减小了基座姿态控制系统的能量消耗。
(4) 研究了空间冗余机械臂的增强混合阻抗控制,该阻抗控制策略结合基于运动学的构型控制以及混合阻抗控制理论。分析了该阻抗控制算法的力跟踪特性。并且提出基于增强混合阻抗控制的空间冗余机械臂的辅助对接策略。仿真结果表明,基于该算法的空间冗余机械臂在完成复杂情况下力控制任务时增加了与环境之间的柔顺性以及力控制方向上的力跟踪精度。
(5) 研究了在空间机械臂的全数值仿真系统中验证冗余机械臂的位置控制、协调控制以及力控制。并且搭建了相应的数值仿真系统。本文根据机械臂实际控制系统建立的空间机械臂全数值仿真系统可以有效的验证控制系统理论的完备性,控制系统参数的实际意义以及分析控制系统各部分环节的关键作用。仿真实验结果表明,采用全数值仿真可以有效地进行空间冗余机械臂的控制研究,其克服了实物仿真的局限性。基于本文所建立的全数值仿真系统对于空间机械臂的半实物仿真以及实物仿真均具有较强的参考价值。
结合目前工作中存在的问题,后期的研究将从以下几个方面进行:
(1)本文所研究的空间机械臂递推多体动力学主要应用于半实物实时仿真系统中模拟机械臂的运动情况。且算法的精度与实际机械臂的运动情况的一致性还有待进一步验证。
(2)基于增强混合阻抗控制理论的空间冗余机械臂的控制使机械臂存在第二柔顺面,因此如何对该柔顺面有效的施加力控制以及柔顺控制进而增加机械臂与环境之间的交互能力值得进一步深入研究。
(3)本文研究的空间冗余机械臂的控制算法仅在空间机械臂的全数值仿真系统中进行了验证,因此有必要进行实际实验验证。
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《空间七自由度冗余机械臂动力学建模与控制研究》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网机械论文栏目。
 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文