硕士论文网第2020-09-30期,本期硕士论文写作指导老师为大家分享一篇
硕士论文文章《改进蚁群算法下的六自由度机械臂避障路径规划》,供大家在写论文时进行参考。
本文是一篇硕士论文,本章主要介绍了基于改进蚁群算法实现机械臂避障路径规划的运动仿真及实验验证,包括实验平台的介绍、虚拟样机的构建方法以及实验验证的过程,同时对实验结果及误差做出了分析。仿真实验结果表明,本文所研究的路径规划方法能够快速、准确的搜寻到一条符合机械臂运动要求且避开碰撞的最优路径。
1 绪论
1.1 研究背景与意义
机器人技术最早出现在上世纪 20 年代,其最初的目的是代替工人从事一些简单、重复或具有高危性、环境恶劣的工作[1]。随着科技水平的发展,机器人已经从最初简单的机械结构,发展成为了集合机械学、电子学、仿生学、计算机技术和控制技术为一体的高科技产物。得益于机器人技术的发展,工业机器人技术及产品已成为工业生产制造中不可或缺的部分,是推动柔性制造系统(FMS)、自动化生产线(APL)及智能工厂(FA)实现的重要工具。
在“工业 4.0”和“中国制造 2025”的大背景下,智能制造已经成为了大势所趋,工业机器人在制造业中的重要程度与日俱增。同时,这也对机械臂在关键技术上的研究提出了更高的要求。纵观机械臂的发展历史,人们根据其智能化水平的高低,一般把它划分为三代的历程:第一代机械臂是由美国联合控制公司于 1958 发明的一种顺序控制机械臂[2],也称作示教机械臂。该类型机械臂只能按照预先示教好的目标点和机身姿态进行重复动作的再现,由于自身没有对环境的感知功能,因此只能在固定的工作环境下进行作业。迫于技术条件的限制,这类机械臂柔性很差,不仅工作条件单一,且控制精度无法保证。第二代机械臂是在上一代的基础增加了微电子控制系统,并集成了各种精密的传感器,使其具备视觉、听觉、触觉等功能,这种机械臂可以依靠自身的感知功能将外部环境的变化反馈给控制系统进行相应的动作调整,从而使机械臂可以从事较为复杂的工作。这类机械臂具有精度高,能适应不同工作情况的优点。目前,大多数机械臂还属于第二代产品;第三代机械臂最大的特征是高度智能化,它除了具备第二代机械臂的感知功能外,还具有很强的信息分析能力,能够实现自动规划和决策,独立的完成工作过程中的任务。相比于前两代的机械臂而言,第三代机械臂最大的进化特点是具备智能化,该机械臂目前还处于研究阶段,距离实际的生产应用还有一段距离[3]。
1.2 机械臂避障路径规划的研究现状
机器人的路径规划是指在满足工作条件的基础上,尽可能的寻找到一条从初始点到目标点距离最短且能避开障碍保证自身安全的最优路径[14]。需要强调的是,虽然路径规划和轨迹规划都属于运动规划问题的范畴,但是它们之间有很大区别。路径是指由离散点连接而成的空间曲线,并不包含时间概念,而搜寻路径的策略称之为路径规划[15]。对于机械臂而言,路径规划是寻找其自身位姿的一组特定序列,无需考虑位姿的时间因素。通常情况下,路径规划主要包括环境建模和搜索策略两方面的工作。其中,环境建模是将规划空间用数学的方式表达出来,搜索策略是对路径搜索算法的研究。轨迹是在路径的基础上,对构成路径的各个节点赋予时间信息[16]。机械臂的轨迹规划是指给定其末端执行器的跟踪路径,在考虑其动力学及各种形式的约束的前提下,规划出各个关节的位置、速度、加速度等状态随着时间的变化函数。路径规划问题的数学描述如下:在已知目标函数约束条件的前提下,求解该函数的最优值。其中,目标函数为路径规划的评价指数,约束条件为满足机械臂的运动条件以及避免与障碍物发生碰撞。
2 六自由度机械臂运动学分析
2.1 机械臂 D-H 运动模型的构建
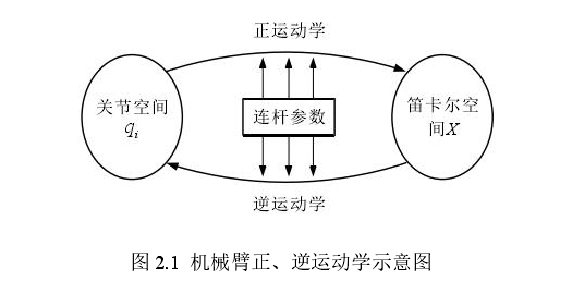
D-H 法是由 Denavit 和 Hartenberg 两位学者在 19 世纪 60 年代提出的一种描述机械臂运动模型的通用型方法[45]。其基本原理是分别在机器人各个连杆上固定一个坐标系,将相邻两连杆间的相对空间关系通过 4*4 阶层的齐次坐标变换矩阵来表示。通过各杆间的依次变换最终得到机械臂末端拾器相对于底座的位置和姿态。机械臂的运动学是指在不考虑自身重量和外部作用力的前提下,研究构成机身各个刚性连杆间的运动规律,同时这也是机械臂进行路径规划问题研究的基础和前提。本章的研究内容主要包括以下两个部分:其一,机械臂的正运动学求解,即在给定机械臂各个连杆的相关参数及关节转角的条件下,根据坐标变换原理推导其末端执行器相对于基坐标系的位置和姿态,并通过合适的数学模型表示出来;其二,机械臂的逆运动学求解,即在给定机械臂 6 连杆的参数信息和末端执行器位姿的数学表达模型的前提下,通过逆解运算得到机械臂各个关节的角度值,它们两者间的关系如图 2.1 所示。机械臂的运动本质是机身关节的旋转,而在实际应用中,人们往往将机械臂第 6 轴上的工具中心点(TCP 点)在笛卡尔坐标系中的位姿状态来表示机械臂的实际位姿。因此,研究机械臂运动学方程的目的是为了建立机械臂关节空间和笛卡尔空间坐标的转换。本章以 ABB1410 型号的六自由度机械臂为研究对象,运用 D-H 法建立其运动模型,在此基础上实现该型号机械臂的正、逆运动方程的推导。
2.2 本章小结
本章主要对六自由度机械臂运动学进行了分析与研究。首先采用 D-H 法建立机械臂运动模型,进而对机械臂正运动学方程进行推导。随后,对机械臂的逆运动学进行了分析,在正运动学方程的基础上,通过反推法推导得到机械臂逆运动学方程。然后利用 MATLAB 软件中机器人工具箱构建机械臂的仿真模型,任意选择了 20 组具有代表性的关节转角和位姿矩阵对正、逆运动学方程进行了验证。最后通过对机械臂运动轨迹的仿真,得到了各个关节转角随时间的变化曲线以及末端执行器在空间中的运动轨迹。仿真结果表明,本章节推导的机械臂运动模型及正、逆运动学方程均正确有效。
3 机械臂碰撞检测方法研究
3.1 常用的碰撞检测方法
3.2 机械臂与障碍物间的碰撞检测
3.3 碰撞检测算法仿真分析
3.4 本章小结
4 基于改进蚁群算法的机械臂避障路径规划
4.1 蚁群算法
4.2 蚁群算法的改进
4.3 基于改进蚁群算法的三维路径规划
4.4 机械臂的避障路径规划方法
4.5 机械臂路径规划实例
4.6 本章小结
5 机械臂路径规划仿真分析与实验验证
5.1 仿真分析
5.2 实验验证
5.3 本章小结
6 结论与展望
6.1 总结
对于六自由度工业机械臂而言,运动学及避障路径规划技术一直是其研究的热点方向。在此背景下,本文以 ABB1410 型号的工业机械臂为研究对象,对六自由度机械臂的路径规划方法进行了深入研究。本论文的主要工作及结论总结如下:
1)采用 D-H 法建立机械臂的运动模型,完成正、逆运动学方程的推导,实现笛卡尔空间到关节空间的映射,为机械臂的路径规划研究奠定基础。
2)分析机械臂与障碍物的几何特征,设计了基于圆柱体与长方体包络法的碰撞检测方法,将碰撞检测问题转化为了求解空间几何体位置关系的问题。通过实例证明,此方法建模简单、计算复杂度低、检测效率较高,能够很好的适用于机械臂的避障路径规划。
3)针对普通蚁群算法收敛速度慢,寻优结果差等缺点,提出了粒子群算法优化参数、设置信息素阈值、自适应调节挥发系数及信息素强度变参数调节的改进措施,使算法的收敛速度、寻优质量、稳定性和时效性均得到明显的改善。采用栅格法构建障碍环境模型,使用改进后的蚁群算法进行路径规划,并利用二次 B 样条曲线对路径进行平滑处理,结合机械臂逆解和碰撞检测算法,实现机械臂在三维空间中的避障路径规划。最后,通过 MATLAB 软件进行实例分析,结果表明,该算法能够快速准确的规划一条符合机械臂避障要求的平滑且最优路径,证明了改进算法的有效性及优越性。
4)利用 Solidworks 和 ADMAS 软件构建机械臂的虚拟样机,对课题中提出的路径规划方法进行仿真实验,并以 ABB1410 工业机器人为对象搭建实物平台进行试验验证。试验结果表明机械臂能够沿着算法规划的路径平稳运行,实现从初始点到目标点的无碰撞运动。
6.2 展望
随着机器人技术的快速发展及相关配套系统的不断完善,在未来的各个领域中,机械臂的使用率必将不断提高。一套精准有效的路径规划技术不仅能提高机械臂的工作效率,更是安全生产的重要保障。本课题主要研究在障碍环境完全已知的前提下,解决六自由度机械臂的避障路径规划问题,课题中还存在着许多亟待解决的技术问题,归纳如下:
1)本文假设在机械臂进行避障路径规划的工作空间中,其障碍物信息是完全已知,属于静态环境下的全局路经规划问题。对于环境变化,障碍物信息未知的情况下,如何实现机械臂的实时避障及局部路径规划,同样是机械臂路径规划中亟待解决的问题。
2)本文在对机械臂进行碰撞检测的方法中,采用单一形状的包络法对障碍物和机械臂进行了抽象化简,过程中忽略了臂身结构和障碍物的细节信息,此方法的检测精度较低。如何进一步提高机械臂的碰撞检测精度,是课题下一步需要解决的问题。
3)本课题的路径规划方法是针对单机械臂独立工作的情况,对于多机协同作业的情况下,如何解决它们相互间的避障及调度问题,也是非常值得研究的一项课题。
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《改进蚁群算法下的六自由度机械臂避障路径规划》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网硕士论文栏目。

 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文