硕士论文网第2020-09-30期,本期硕士论文写作指导老师为大家分享一篇
博士论文文章《基于视觉的拟人双臂机器人自主协调操作研究》,供大家在写论文时进行参考。
本文是一篇博士论文,针对双臂机器人自主协调运动学习研究,建立了基于 PCA,GMM 以及 GMR 组成的学习模型,从多组人臂演示数据中提取双臂协调特征,并成功应用于双臂机器人拟人运动任务重建。本章主要贡献包括:1) 提出了基于卷积神经网络的人臂末端姿态估计方法,通过 Kinect 传感器获取了人臂运动数据以及末端姿态数据,使得机械臂示教编程具有更好的泛化性与环境适应性;2) 提出了基于臂内协调特征与臂间协调特征的双臂机器人拟人协调运动方法,在机械臂运动重建中复现了人臂协调运动特征。
绪论
1.1 课题背景及研究目的和意义
双臂机器人由于具有良好的性能表现,广泛应用于多个领域[1]。包括工业领域:在自动化生产线中代替人类完成搬运、装配、研磨等生产任务。地面与水下探索领域:在探测车与水下航行器的前端安装两个机械臂,并配置多种外部传感器来实现样本采集任务;也可以在核电站等危险环境中完成维护、营救等任务。航天领域:在空间站外安装两个大型空间机械臂来实现对接任务、干扰破坏等任务,双臂宇航机器人可以代替宇航员实现在轨维护、卫星捕捉等任务。医疗与生活服务领域:在手术室环境中完成切割,缝合以及打结等手术操作任务,在医院为患者提供递交,倾倒以及穿衣等护理任务;拟人双臂机器人被设计在家庭厨房等场合用来辅助人类完成料理制作,洗碗以及叠衣服等任务,这类任务通常需要外部传感器进行引导控制,同时需要机器人模拟人类动作。 双臂机器人具备以下特点:1) 操作灵活性高:具有两个类人地冗余机械臂,可以使得操作目标不受固定位置和姿态的限制[2];2) 可靠性高:利用其闭链冗余特性可以实现回避关节奇异性、关节运动极限和障碍物等功能,并且具有较强的容错性,当发生故障时可以实现任务再规划[3];3) 交互能力强:由于其类人的构造使得人机交互变得更直接[4]。因此,双臂机器人可以胜任复杂操作任务以及适应多变工作环境。
1.2 双臂机器人研究现状
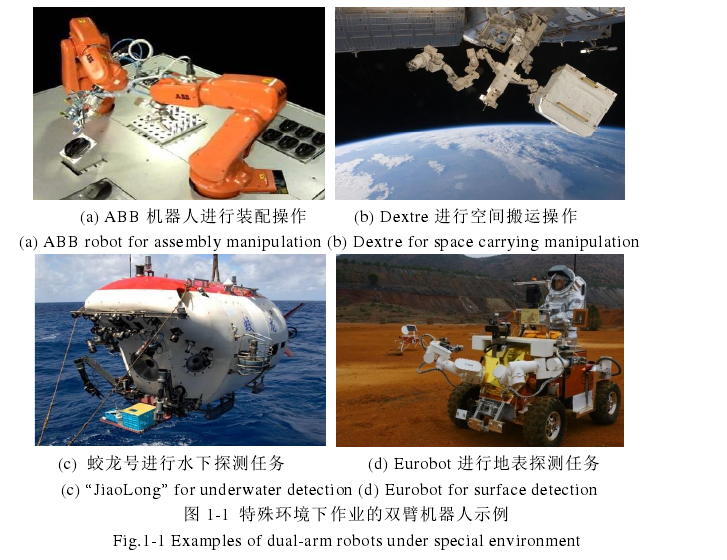
双臂机器人主要应用于特殊环境和与人类交互环境中。特殊环境下作业的双臂机器人示例如图 1-1 所示,通常由两个单机械臂组成,并且机械臂的尺寸与人类手臂相差较大,机械臂基座固定的位置也各有差异,这是因为它们需要被应用于特定的环境中。如图 1-1(a)所示,两个 ABB 工业机械臂被固定在生产线的两侧,进行鼠标装配操作。图 1-1(b)中 Dextre 空间机器人的两个尺寸巨大的机械臂被固定空间站两侧,用来进行在轨维护等任务。图 1-1(c)中的蛟龙号的两个机械臂被固定在探测仓前端,用于海底表面的样本采集。特别地,在 2010年通过机械臂将五星红旗插入中国南海海底 3759 米表面。图 1-1(d)中 Eurobot外星探测车前端装有两个机械臂用来采集地表样本。
第 2 章 面向非对称协调任务的自主定位方法
2.1 引言
在双臂非对称协调操作中,第一阶段是需要实现两个操作物的定位任务。操作物被两个机械臂末端执行器固定地夹持,通过控制机械臂末端运动来实现操作物位姿控制。通常情况下,操作物模型是需要精确已知的,比如轴孔对齐任务,需要已知轴与孔的长度以及直径等。然而,除了在工业装配等特殊场合,多数的应用场合下很难获得精确的操作物模型,这也限制了拟人双臂机器人的应用范围。 人类手臂在执行非对称协调任务时是无需精确已知操作物模型,这是因为人类可以通过眼睛来观测操作物的特征,进而引导手臂实现操作物位姿对齐,这就是所谓的手眼协调操作。为了使得机器人可以像人类一样实现手眼协调操作,本章采用摄像机对操作物的位姿特征进行实时采集,并应用视觉伺服方法控制机械臂完成任务,进而提高双臂机器人在定位任务中的环境适应能力。
2.2 双臂非对称协调任务描述
本章目标是通过双臂机器人实现两个操作物的位姿对齐任务。轴与孔是具有泛化特征的操作物,它可以是圆柱形的多轴孔,或是方形的轴孔,例如三项的插座与插头,方形的杯子与杯盖等。以下两个操作物以轴孔为例给出说明:
(1) 轴孔位姿对齐任务视为将轴与孔的轴线以及端面中心点位置进行对齐。
(2) 轴与孔的端面中心到两个机械臂末端坐标系原点的位置向量是未知的,轴与孔的直径也是未知的。
(3) 轴被右臂末端夹持且保持固定,孔被左臂末端夹持且位姿保持固定。
(4) 双臂末端执行器上的特征点保持在场景摄像机视野内。
(5) 轴孔位姿对齐目标精度为各个坐标轴方向的位置误差为<5mm,姿态误差为<1°,这符合通用的装配任务的初始位姿对齐误差[144]。
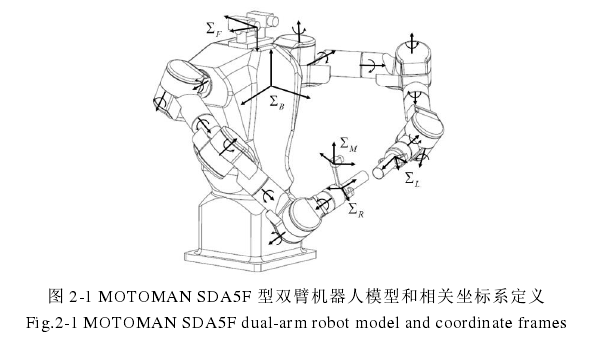
采用MOTOMAN SDA5F双臂机器人平台,它具有两个7DOF冗余机械臂。由于操作物的模型未知,因此需要采用多于一台摄像机对操作物的三维模型进行重建。那么视觉系统由两台单目彩色摄像机组成(其中使用了双目摄像机中的一台摄像机),一台摄像机放置机器人头部作为场景摄像机,一台固定在右机械臂末端附近作为手眼摄像机,通过场景和手眼两台摄像机对目标特征进行观察来完成双臂协调任务。双臂机器人相关坐标系定义如图2-1所示。 对于机械臂视觉伺服控制,由于PBVS方法过于依赖摄像机和操作物模型参数,而在操作物模型未知的情况下很难应用于实际任务。因此本章采用IBVS方法对两个机械臂进行手眼协调控制。
第 3 章 面向对称协调任务的自主跟踪方法
3.1 引言
3.2 双臂对称协调任务描述
3.3 基于视觉的双臂对称协调运动控制策略
3.4 自适应神经网络视觉伺服控制器设计
3.5 基于对偶神经网络的冗余闭链运动学优化
3.6 双臂自主跟踪实验
3.7 小结
第 4 章 基于视觉和力示教学习的人机协作控制策略
4.1 引言
4.2 机械臂协调操作学习策略
4.3 人臂示教数据获取
4.4 人机协调阻抗模型
4.5 位置/力协调特征学习模型
4.6 最优控制变量求解
4.7 人机协作实验
4.8 小结
第 5 章 基于视觉示教学习的拟人双臂协调运动策略
5.1 引言
5.2 拟人协调特征学习策略
5.3 基于卷积神经网络的人臂末端姿态估计
5.4 人类双臂示教数据获取与分析
5.5 人臂协调运动特征学习模型
5.6 双臂机器人协调运动重建
5.7 拟人双臂协调运动实验
5.8 小结
结 论
本课题来源于国家自然科学基金面上项目,课题编号:61673134。本课题的目的是将视觉伺服、示教学习方法引入到双臂机器人协调操作研究中,使得机器人可以完成双臂定位、跟踪等自主操作任务,同时通过人类演示数据学习,使得机器人可以获得拟人协调技能,完成动作模仿、人机协作任务。本课题的研究将提升双臂机器人在非结构环境下的协调操作能力,以及与人类的交互能力,扩展了双臂机器人的应用范围。本文以操作自主化与操作拟人化为背景,对双臂机器人视觉伺服系统中的不确定、示教学习中的协调技能获取方法进行了研究,完成的主要研究工作如下:
(1) 研究了面向双臂协调插孔类任务的双臂自主定位方法,实现了操作物模型未知情况下的操作物位姿对齐。采用手眼和场景组合视觉系统分别实时观测双臂末端特征与操作物特征,通过基于非对称协调约束的视觉空间路径规划和多任务图像雅克比,控制双臂运动使得轴与孔从初始位姿到预对齐,再到位姿对齐。完成了双臂对接插头与双臂盖杯盖等实验任务。结果表明提出方法可以成功实现任务目标并且操作精度在目标精度以内。
(2) 研究了面向双臂协调搬运类任务的双臂自主跟踪方法,实现了双臂重复运动中的视觉空间与关节空间的闭合轨迹跟踪任务。采用场景摄像机对操作物上的特征进行实时观测,通过设计自适应神经网络视觉伺服控制器以及基于对偶神经网络的冗余闭链运动学优化,来解决双臂抓取位置不确定以及抑制关节漂移等问题。完成了梯形轨迹跟踪的双臂端托盘任务和封闭圆弧轨迹跟踪的双臂转动方向盘任务,结果表明提出方法可以成功实现任务目标,并与传统PI控制结果相比获得较好的效果。
(3) 研究了面向人机协作任务的机器人拟人协调操作学习策略。采用立体相机和力传感器对人类双臂的操作演示数据进行捕捉。通过对演示数据进行任务参数化编码和泛化获得人类双臂协作特征轨迹;建立人机双臂协作模型并给出模型参数—位置/力协调因子;结合特征轨迹与最优控制在线更新模型参数,并通过机械臂导纳控制器控制机械臂跟踪人臂运动的位置与力轨迹实现人机协调搬运任务。完成了机械臂与人臂共同夹持箱子运动,结果表明提出方法可以成功实现任务目标,并对人机双臂相对位置误差与操作物内应力抑制方面获得了较好的效果。
(4) 研究了双臂机器人拟人协调运动学习策略。采用Kinect对人臂末端位置进行捕捉,发展基于卷积神经网络的人臂末端姿态估计方法获取姿态信息;将人臂演示数据进行主成分分析,数据编码与泛化获得特征空间的协调运动轨迹;建立拟人协调运动方程实现双臂拟人协调运动重建。完成人臂末端姿态估计实验验证人臂演示数据捕捉的正确性,同时完成双臂模拟倾倒和双臂模拟搬运等任务,结果表明提出策略可以有效地使双臂机器人获得了协调运动技能,并与基于雅克比伪逆的冗余机械臂控制进行对比获得了较好的效果。
该论文为收费论文,请扫描二维码添加客服人员购买全文。

以上论文内容是由
硕士论文网为您提供的关于《基于视觉的拟人双臂机器人自主协调操作研究》的内容,如需查看更多硕士毕业论文范文,查找硕士论文、博士论文、研究生论文参考资料,欢迎访问硕士论文网博士论文栏目。
 首页
首页 毕业论文
毕业论文 硕士论文
硕士论文 博士论文
博士论文 学位论文
学位论文 在职硕士
在职硕士 职称论文
职称论文 研究生论文
研究生论文 留学生论文
留学生论文